SIMLAN — Simulation for Multi-Camera Robotics
December 31, 2024
SIMLAN (Simulation for Multi-Camera Robotics) is a simulation environment based on Ignition Gazebo and ROS 2 that resembles a Volvo Trucks warehouse. It serves as a playground for rapid prototyping and testing of systems relying on a multi-camera setup for perception, monitoring, localization, or navigation.
Demo
GPSS — Generic Photo-based Sensor System
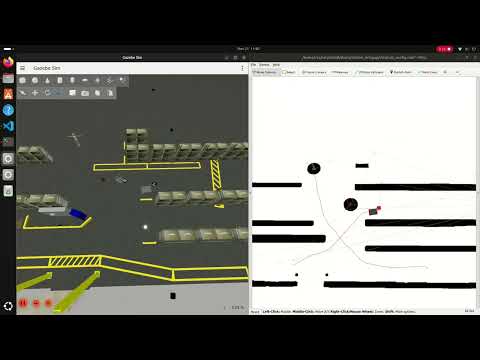
Inspired by the Volvo GPSS system using ceiling-mounted cameras for warehouse navigation:
GPSS controls (ArUco localization, Nav2 navigation):
RITA — Robotic Arm and Humanoid
Panda arm and humanoid worker integration:
Installation
Features
- Ignition Gazebo with a library of realistic warehouse assets
- Real-world environment design inspired by ceiling-mounted camera layouts
- ROS 2 interfaces (Humble and Jazzy)
- Simple GPSS (Generic Photo-based Sensor System) navigation
- Multi-robot localization and navigation using Nav2
- ArUco marker localization
- Bird’s-eye view projection and camera stitching
- Multi-sensor support (LiDAR, RGB, semantic segmentation, depth)
- Geofencing for safe zones and safe stop on collision
- Humanoid worker model with deep-learning-based pose capture and replay
- Panda robotic arm with pick-and-place scenarios
Documentation
Research Funding
Carried out within: