RITA-SIM
December 31, 2025
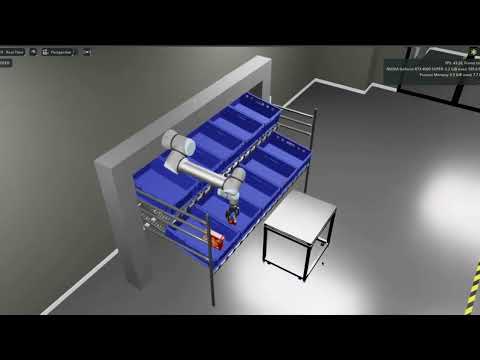
RITA (Robot In The Air) is a collaborative robot project developed as a use case for human-robot collaboration (HRC) within the manufacturing industry, specifically for Volvo Group Trucks Operations (GTO).
This repository has three components:
- ROS 2 container for robot control, MoveIt, and controllers.
- Isaac Sim container for simulation.
- cuMotion container planning.
Pick and Place
Dynamic Obstacles
Moving cylinder obstacle:
Moving humanoid obstacle:
Hybrid Planner (cuRobo MotionGen + MPC)
Features
- Pick and place scenarios with cuMotion, cuRobo, OMPL, and hybrid planners
- Dynamic obstacle avoidance with moving cylinder and humanoid obstacles
- Human pose capture and replay using deep learning
- 3D Gaussian Splatting asset support for photorealistic scenes
- Automated testing via TESTING.md workflow
DevContainers
Three VS Code DevContainers are provided:
- UR10 ROS2 DevContainer — ROS 2 development and control stack
- IsaacSim DevContainer — Isaac Sim runtime and ROS bridge
- UR10e cuMotion DevContainer — cuMotion planner runtime
Motion Planners
| Planner | Description |
|---|---|
| cumotion | GPU-accelerated motion planning via cuMotion |
| curobo | GPU-based trajectory generation |
| ompl | CPU-based open motion planning library |
| hybrid | cuRobo MotionGen (global) + MPC (local reactive) |
Credits
Master thesis project at Infotiv by Elias Wilsborn and Marcus Olsson, under team/tech lead Hamid Ebadi. Carried out within the EUREKA ITEA4 ArtWork project.